
")
Πλήρως αυτοματοποιημένο σύστημα ηλεκτροφόρησης
Έργο: Μελέτη και κατασκευή πλήρως
αυτοματοποιημένου συστήματος ηλεκτροφόρησης
Το έργο «Μελέτη και Κατασκευή Πλήρως Αυτοματοποιημένου Συστήματος Ηλεκτροφόρησης» με συντομογραφία “Autoelectrophoresis” αποτελεί μία σύμπραξη δύο φορέων της «EVRESIS Ανώνυμος Εταιρεία Εφαρμογών Πληροφορικής» και του ΑΤΕΙΘ / Τμήμα Μηχανικών Αυτοματισμού ΤΕ (ΑΤΕΙΘ) με αντικείμενο τη δημιουργία μίας νέας συσκευής για εφαρμογές ηλεκτροφόρησης, πλήρως αυτοματοποιημένη όσον αφορά τις λειτουργίες της.
Το συγκεκριμένο έργο έχει διάρκεια 24 μήνες, αρχής γενομένης της 28 ης Ιουνίου 2018. Η συγκεκριμένη έκθεση έχει τον χαρακτήρα της «Δεύτερης Ενδιάμεσης Έκθεσης» όπως αυτή ορίζεται στην 5 η τροποποίηση της σχετικής Πρόσκλησης – Οδηγού Προγράμματος καθώς υποβάλλεται 12 μήνες πριν την τελική ημερομηνία ολοκλήρωσης του έργου (27/6/2020).
Κατά συνέπεια η συγκεκριμένη έκθεση αφορά την πορεία υλοποίησης του έργου κατά τους πρώτους 12 μήνες από την έναρξη του.
Οι βασικοί στόχοι του έργου, όπως αυτοί περιγράφονται στο ΤΠΕ, παρατίθενται παρακάτω:
«…Καλύπτοντας το κενό στην αγορά, ο βασικός στόχος είναι η δημιουργία μιας πλήρως αυτοματοποιημένης συσκευής ΗΦ που θα παρέχει τις παρακάτω καινοτομίες:
-
Μηχανολογικός εξοπλισμός με βάση στήριξης και πλαίσιο στήριξης φιλμ καθώς και θύρα εισόδου, αναλυτική σχεδίαση και δημιουργία των πλαστικών τμημάτων ΗΦ, κατασκευές μεταφοράς δείγματος (ειδικό δοχείο διατήρησης των δειγμάτων και βάση-φορέα δειγμάτων, πλαίσιο, δοχείο καθαρισμού), ειδικές κατασκευές χρωστικής ουσίας (θάλαμοι, δοχεία, αντλίες), θάλαμος στεγνώματος, χρώσης, πλύσης, θάλαμο σάρωσης για επεξεργασία εικόνας, βάση εξόδου φιλμ και θύρα εξόδου φιλμ, μηχανισμός εξαγωγής φιλμ, δοχεία απόθεσης αποβλήτων (υγρών πλύσης και απόρριψης χρώματος) και αντλία.
-
Ψηφιακός ρομποτικός βραχίονας και ηλεκτρονικά/ηλεκτρολογικά τμημάτων συσκευής. Καθοδήγηση από ψηφιακό ρομποτικό βραχίονα ώστε να μην απαιτείται ανθρώπινη παρέμβαση (οδηγεί σε συστηματικά σφάλματα) και να υπάρχει άμεση μετάβαση μεταξύ των επιμέρους σταδίων.
-
Εξειδικευμένο λογισμικό (firmware και software) διαχείρισης της διαδικασίας ΗΦ και υποστήριξης απόφασης Θα ελέγχει πλήρως τη λειτουργία του ρομποτικού βραχίονα, θα είναι υπεύθυνο για την τήρηση χρόνων και προδιαγραφών της ΗΦ σε κάθε στάδιο και τέλος θα αναλύει τα αποτελέσματα ώστε να εκδίδει τα αποτελέσματα της διαδικασίας. Θα είναι διαλειτουργικό με πληροφοριακά συστήματα τρίτων…»
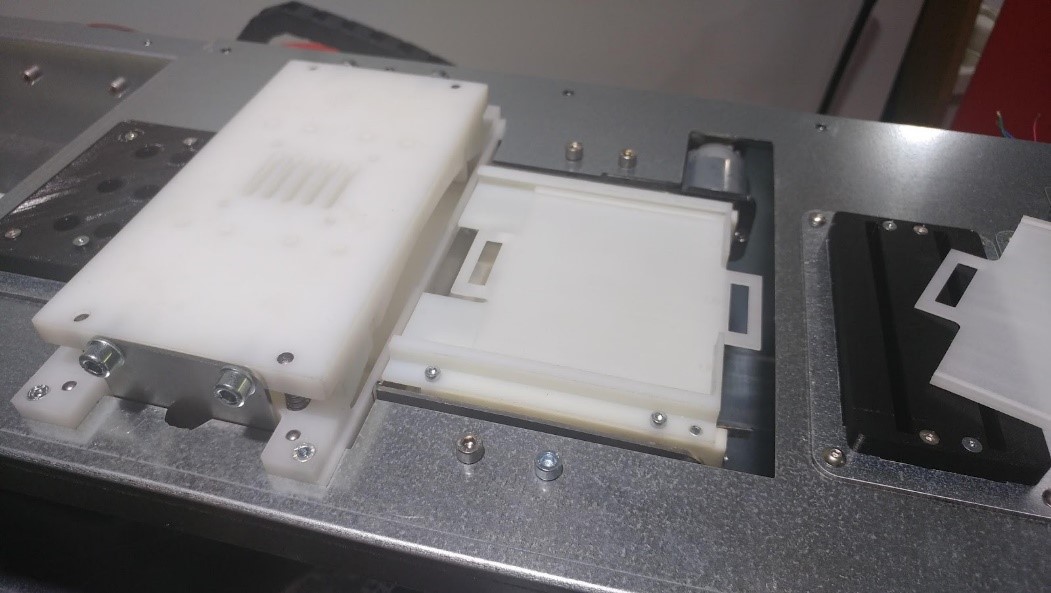
EE1 - Ανάλυση απαιτήσεων, 3D σχεδίαση επιμέρους τμημάτων και τεχνικές προδιαγραφές
ΒΙΕ: Βιομηχανική Έρευνα (Άρθρο 25)
Χειρωνακτική Διαδικασία Ηλεκτροφόρησης

Αυτόματο μπάνιο της συσκευής Ηλεκτροφόρησης
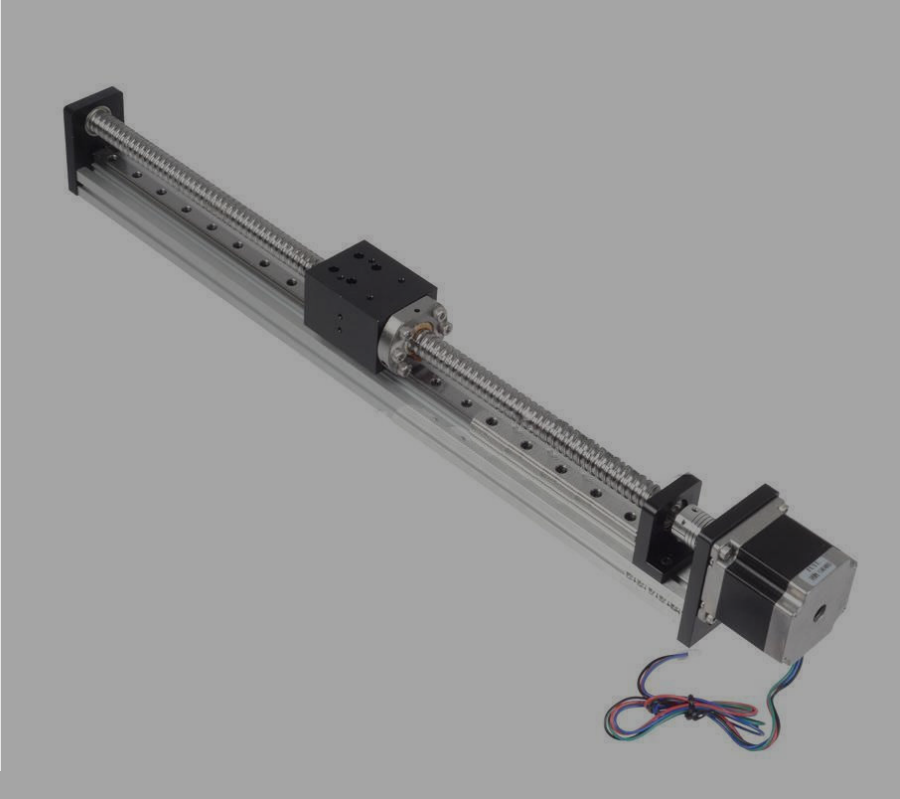
EE3 - Υλοποίηση Ψηφιακού Ρομποτικού Βραχίονα και ηλεκτρονικών / ηλεκτρολογικών τμημάτων
ΒΙΕ: Βιομηχανική Έρευνα (Άρθρο 25)
Ρομποτικός βραχίονας οριζόντιας κίνησης
Υλοποίηση Τροφοδοτικού Ηλεκτροφόρησης

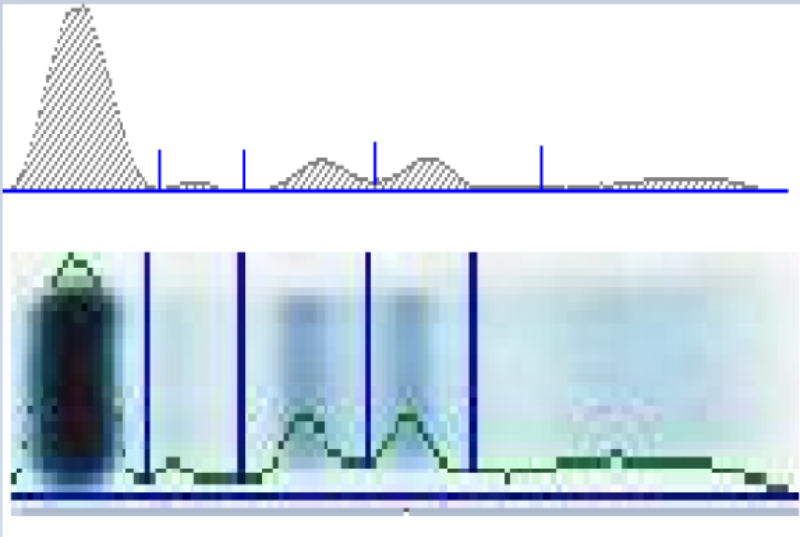
EE4 - Ανάπτυξη του λογισμικού (firmware και software) στη συσκευή
ΒΙΕ: Βιομηχανική Έρευνα (Άρθρο 25)
Φιλμ Ηλεκτροφόρησης
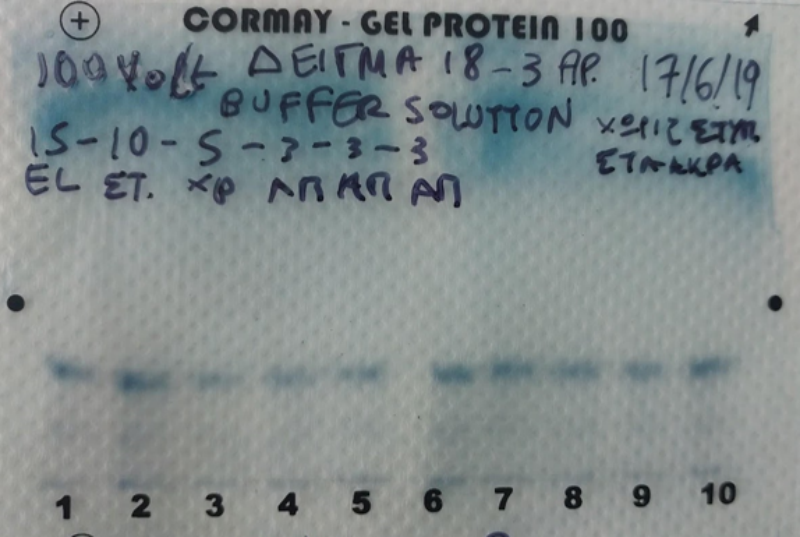
Εφαρμογή Αλγορίθμου Αναγνώρισης φιλμ Hλεκτροφόρησης